자율주행차가 복잡한 교차로에서 멈춰야 할지, 진행해야 할지 판단해야 한다고 상상해보세요. 보행자가 많고, 옆에는 자전거 도로가 있으며, 불법주차 차량까지 있는 상황입니다. 기존 AI는 이런 복잡한 상황에서 “왜” 그런 판단을 내렸는지 설명하기 어려웠죠. 엔비디아가 이 문제에 새로운 해법을 내놨습니다.

엔비디아는 NeurIPS 2025 AI 컨퍼런스에서 Alpamayo-R1(AR1)을 공개했습니다. 자율주행 연구를 위한 세계 최초의 오픈소스 추론 기반 비전-언어-행동(VLA) 모델입니다. 이 모델은 단순히 주행 경로를 생성하는 것을 넘어, 상황을 단계별로 분석하고 “왜” 그렇게 판단했는지 설명할 수 있습니다.
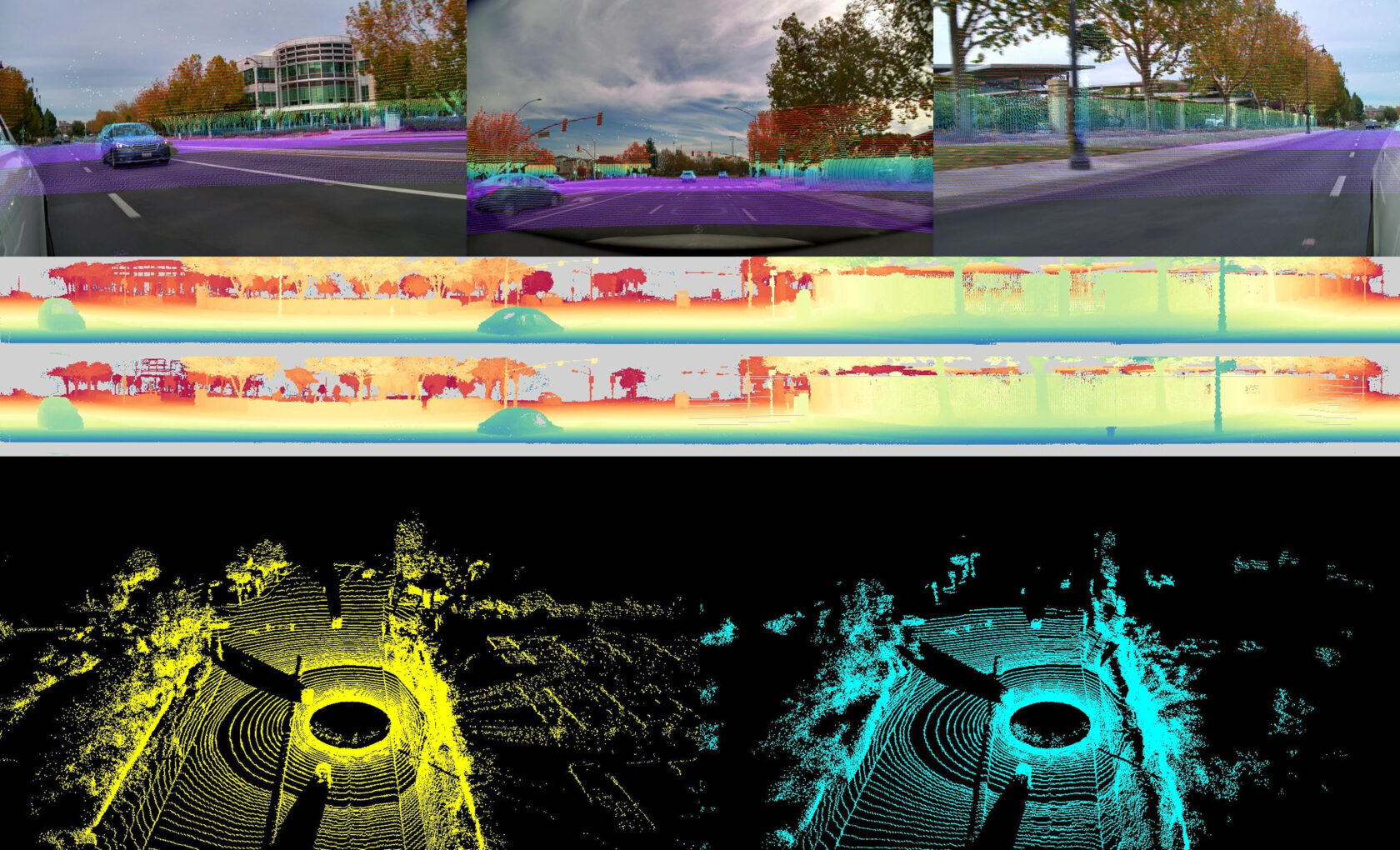
출처: NVIDIA Advances Open Model Development for Digital and Physical AI – NVIDIA Blog
사람처럼 생각하는 자율주행
AR1의 핵심은 chain-of-thought 추론입니다. 기존 모델이 센서 데이터를 받아 즉시 주행 명령을 내렸다면, AR1은 상황을 분해하고 가능한 모든 경로를 고려한 뒤 최선의 선택을 합니다.
예를 들어볼까요? 보행자가 많은 지역에서 자전거 도로 옆을 주행하는 상황입니다. AR1은 경로 데이터를 받아들인 뒤, 추론 과정(reasoning traces)을 거쳐 판단합니다. “자전거 도로에서 멀어져야 한다” 또는 “무단횡단할 수 있는 보행자를 위해 멈춰야 한다”는 식이죠. 마치 사람 운전자가 머릿속으로 여러 시나리오를 그려보고 결정하는 것과 비슷합니다.
이런 추론 능력은 Level 4 자율주행, 즉 특정 영역과 조건에서 완전한 자율주행을 달성하는 데 핵심입니다. 엔비디아는 이 모델이 자율주행차에 “상식”을 부여해 사람처럼 섬세한 판단을 내릴 수 있게 한다고 설명합니다.
오픈소스로 공개한 이유
AR1은 엔비디아의 Cosmos Reason 모델을 기반으로 만들어졌으며, 비상업적 연구 목적으로 자유롭게 커스터마이징할 수 있습니다. GitHub와 Hugging Face에서 바로 다운로드할 수 있고, 학습과 평가에 사용된 데이터 일부도 NVIDIA Physical AI Open Datasets를 통해 공개됩니다.
엔비디아가 이 모델을 오픈소스로 공개한 건 자율주행 연구 생태계를 활성화하기 위해섭니다. 연구자들은 AR1을 벤치마킹하거나 자신의 실험적 자율주행 애플리케이션에 활용할 수 있죠. 강화학습을 통한 후속 학습(post-training)도 효과적이라고 합니다. 실제로 사전 학습된 모델 대비 추론 능력이 크게 향상되는 결과가 관찰됐습니다.
독립 벤치마크 기관인 Artificial Analysis는 최근 공개한 Openness Index에서 엔비디아의 Nemotron 계열을 AI 생태계에서 가장 투명한 모델 중 하나로 평가했습니다. 라이선스 허용성, 데이터 투명성, 기술 세부 정보 공개 측면에서 높은 점수를 받았죠.
Cosmos 생태계의 확장
AR1은 엔비디아의 Cosmos 생태계의 일부입니다. Cosmos는 물리적 세계를 이해하고 시뮬레이션하는 AI 모델 모음인데요, 자율주행, 로봇공학, 시뮬레이션 등 현실 세계와 상호작용하는 AI를 만드는 데 필요한 기초 모델들(World Foundation Models)을 제공합니다.
AR1 공개와 함께 엔비디아는 이 생태계를 대폭 확장했습니다. Cosmos Cookbook을 통해 개발자들은 데이터 큐레이션, 합성 데이터 생성, 모델 평가까지 단계별 가이드를 받을 수 있습니다.
주목할 만한 새 도구들도 나왔습니다. LidarGen은 자율주행 시뮬레이션을 위한 라이다 데이터를 생성하는 첫 월드 모델입니다. Cosmos Policy는 사전 학습된 대형 비디오 모델을 로봇 정책으로 전환하는 프레임워크죠. ProtoMotions3는 Cosmos 월드 파운데이션 모델로 생성한 현실적인 장면에서 휴머노이드 로봇을 학습시키는 오픈소스 프레임워크입니다.
Voxel51, 1X, Figure AI, Gatik, PlusAI 같은 업계 파트너들이 이미 Cosmos 월드 파운데이션 모델을 활용해 최신 물리적 AI 애플리케이션을 개발하고 있습니다.
물리적 AI의 미래
엔비디아 공동창업자이자 CEO인 젠슨 황은 AI의 다음 물결은 물리적 AI라고 여러 차례 강조해왔습니다. 수석 과학자 빌 달리도 로봇이 결국 세상에서 큰 역할을 할 것이며, 엔비디아는 “모든 로봇의 두뇌를 만들고 싶다”고 말한 바 있습니다.
AR1 같은 추론 모델은 단순히 자율주행을 넘어 로봇공학 전반에 영향을 미칠 수 있습니다. 복잡한 환경에서 판단하고 행동해야 하는 모든 물리적 AI에 이 접근법이 적용될 수 있으니까요. 엔비디아가 오픈소스로 기술을 공개하며 생태계를 키우는 전략은, 결국 자사 GPU 수요를 확대하는 동시에 업계 전체의 혁신을 가속화하는 두 마리 토끼를 잡으려는 시도로 보입니다.
자율주행 AI가 “왜”를 설명할 수 있다는 건 기술적 진보를 넘어 신뢰의 문제이기도 합니다. AR1이 연구자들에게 어떤 영감을 줄지, 그리고 이 기술이 실제 도로에서 어떻게 구현될지 지켜보는 것도 흥미로울 것 같습니다.
참고자료:
- Nvidia announces new open AI models and tools for autonomous driving research – TechCrunch
- NVIDIA Open Sources Reasoning Model for Autonomous Driving at NeurIPS 2025 – Analytics India Magazine
- Alpamayo-R1 연구 논문 – NVIDIA Research
- Cosmos Cookbook – GitHub Pages
- Cosmos Cookbook GitHub 저장소
- AlpaSim Framework GitHub
- NVIDIA Cosmos-Reason1-7B – Hugging Face
- NVIDIA Physical AI Open Datasets – Hugging Face
답글 남기기